ربات Romeo: ربات انسان نمای هوشمند





0

ربات Romeo، ربات، Romeo
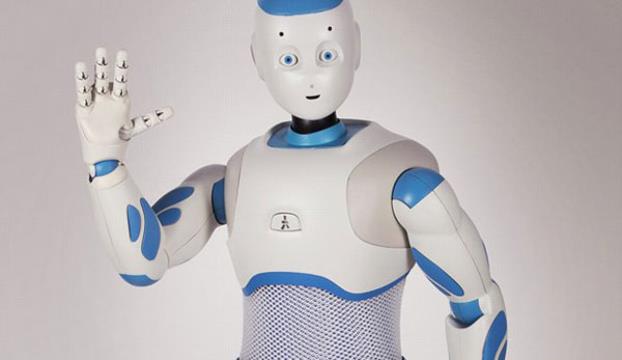
ربات Romeo یک ربات انسان نمای هوشمند بوده که به عنوان یک دستیار برای افراد سالمند در نظر گرفته شده است تا زمان بیشتری را برای ادامه زندگی مستقل در خانههای خود ادامه دهد. ربات Romeo قادر است تا به افراد سالمند در بالا یا پایین رفتن از پلهها کمک نموده یا در جابجا کردن اشیا به آنها یاری رساند. همچنین میتواند نسبت به زمان ملاقاتها یادآوری نموده و یا زمانی که وقت دارو خوردن است به آنها بگوید.
ویژگیهای ربات Romeo:
| وزن | 36.6 کیلوگرم |
| ارتفاع | 146.7 سانتیمتر |
| نوع پردازنده | ATOM Z530 |
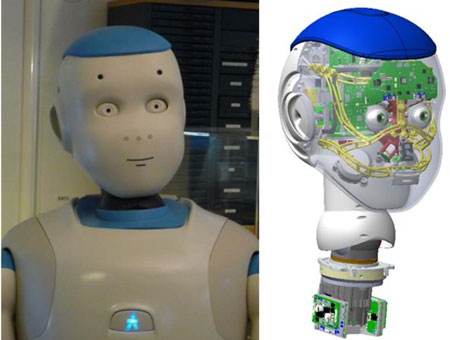
| تعداد میکروفون | 4 |
مقالات مرتبط با ربات Romeo:
"Romeo - Maxon Motor"

ساختار سر ربات Romeo:
| از ... | به ... | X (mm) | Y (mm) | Z (mm) |
|---|---|---|---|---|
| Torso | NeckYaw | 0 | 0 | 93.5 |
| NeckYaw | NeckPitch | 0 | 0 | 0 |
| NeckPitch | HeadPitch | 0 | 0 | 95.11 |
| HeadPitch | HeadRoll | 0 | 0 | 0 |
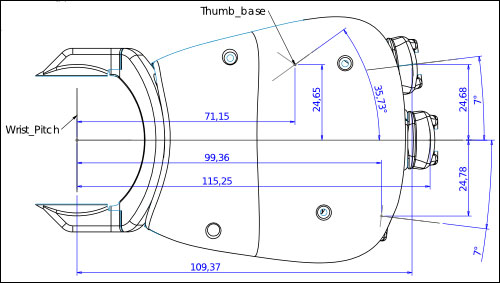
ساختار دستان ربات Romeo:
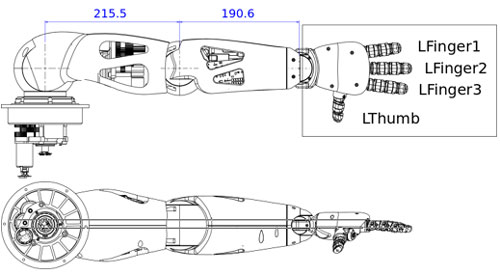
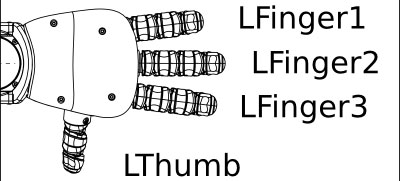
| از ... | به ... | X (mm) | Y (mm) | Z (mm) |
|---|---|---|---|---|
| LWristPitch | LFinger1 | 109.37 | 24.68 | 3.29 |
| LWristPitch | LFinger2 | 115.25 | 0.00 | 3.29 |
| LWristPitch | LFinger3 | 99.36 | -24.78 | 3.29 |
| LWristPitch | LThumb | 71.15 | 24.65 | -12.33 |
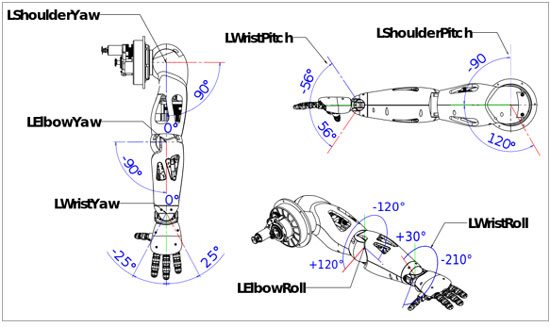
| نام اتصال | حرکت | دامنه - برحسب درجه | دامنه - برحسب رادیان |
|---|---|---|---|
| LShoulderPitch | Left Shoulder joint (Y) | -82.7 to 127.2 | -1.44338729 to 2.22005880 |
| LShoulderYaw | Left Shoulder joint (Z) | -24.7 to 65.3 | -0.43109632 to 1.13970000 |
| LElbowRoll | Left Shoulder joint (X) | -120.0 to 120.0 | -2.09439510 to 2.09439510 |
| LElbowYaw | Left Elbow joint (Z) | -90.0 to 0.0 | -1.57079633 to 0.00000000 |
| LWristRoll | Left Elbow joint (X) | -210.0 to 30.0 | -3.66519143 to 0.52359878 |
| LWristYaw | Left Wrist joint (Z) | -25.0 to 25.0 | -0.43633231 to 0.43633231 |
| LWristPitch | Left Wrist joint (Y) | -56.0 to 56.0 | -0.97738438 to 0.97738438 |
ساختار پاهای ربات Romeo:
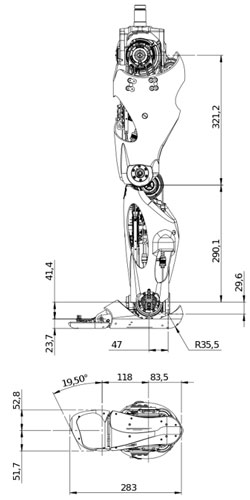
- پای سمت چپ:
| از ... | به ... | X (mm) | Y (mm) | Z (mm) |
|---|---|---|---|---|
| TrunkYaw | LHipYaw | 0 | 96 | -344.3 |
| LHipYaw | LHipRoll | 0 | 0 | 0 |
| LHipRoll | LHipPitch | 0 | 0 | 0 |
| LHipPitch | LKneePitch | 0 | 0 | -321.1 |
| LKneePitch | LAnklePitch | 0 | 0 | -290.1 |
| LAnklePitch | LAnkleRoll | 0 | 0 | 0 |
| LAnkleRoll | LToePitch | 118.0 | 0 | -41.4 |
- پای سمت راست:
| از ... | به ... | X (mm) | Y (mm) | Z (mm) |
|---|---|---|---|---|
| TrunkYaw | RHipYaw | 0 | -96 | -344.3 |
| RHipYaw | RHipRoll | 0 | 0 | 0 |
| RHipRoll | RHipPitch | 0 | 0 | 0 |
| RHipPitch | RKneePitch | 0 | 0 | -321.1 |
| RKneePitch | RAnklePitch | 0 | 0 | -290.1 |
| RAnklePitch | RAnkleRoll | 0 | 0 | 0 |
| RAnkleRoll | RToePitch | 118.0 | 0 | -41.4 |
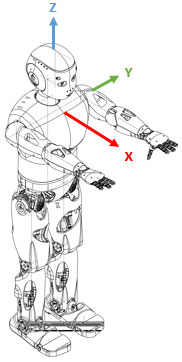
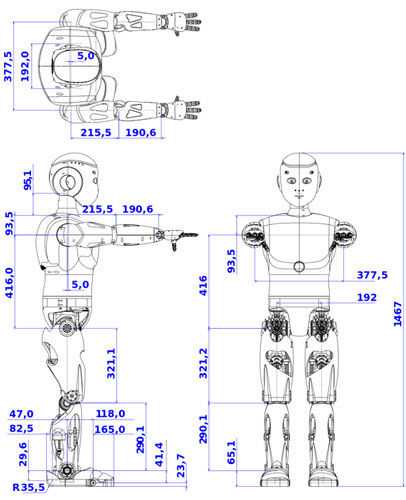
آناتومی ربات Romeo:
تولیدکننده:
- ساخت: کشور ژاپن

- نام سازنده: SoftBank Robotics Corp
کلمات کلیدی:
ربات, رباتیک, romeo, اخبار رباتیک, اخبار, ربات انسان نما, ربات دوپا, cfp
 ارسال نظرات
ارسال نظرات






