اخبار رباتیک:
 1398/2/30 - 08:22
1398/2/30 - 08:22
ربات Gen3: بازوی رباتیک هوشمند
ربات Gen3 یک بازوی رباتیک هوشمند بوده که انعطافپذیر بودن آن محققان را قادر میسازد تا آنها را براساس نیازهای خود، تغییر دهد. ربات Gen3 برای تعامل انسان با ربات ساخته شده است، به این معنی نیست که به طور خودکار برای وظایف طراحی شده باشد، بلکه به افراد این اجازه را میدهد تا فراتر از محدودیتهای فیزیکی خود عمل کنند. ماژول رابط در ربات اجازه میدهد اتصال با طیف گستردهای از عملگرهای پایان، ابزار و سنسور باشد.
 1398/2/29 - 08:49
1398/2/29 - 08:49
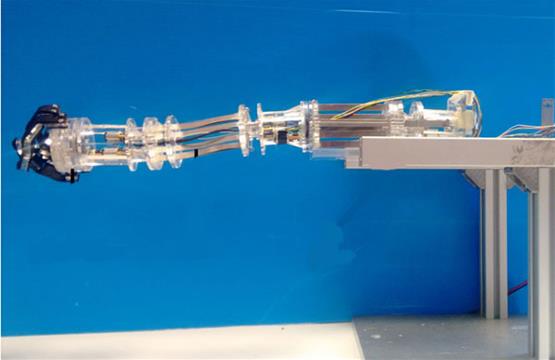
ربات Jaco: بازوی رباتیک هوشمند
ربات Jaco یک بازوی رباتیک هوشمند بوده که یک ربات سبک وزن و دستیار فنی است که برای از دست دادن حرکات بازو طراحی شده است. ربات Jaco شامل شش بخش متصل است که انتهای آن به یک دست سه انگشتی میرسد. از طریق کنترل کننده، کاربر میتواند دست ربات را در فضای سه بعدی حرکت دهد و یا با استفاده از دو یا سه انگشت، دستها را با دست بگیرد. همچنین از یک کنترلر سازگار برای تغییر بین حالت کنترل استفاده میشود.
 1398/2/28 - 07:18
1398/2/28 - 07:18
ربات Niobe: ربات پزشکی هوشمند
ربات Niobe یک ربات پزشکی هوشمند بوده که میتواند پس از مسیریابی، در اعمال جراحی قلبی، کاتترها را به قلب برساند. کاتتر یک لوله نازک، معمولاً بلند و قابل انعطاف و ساخته شده از مواد دارای کاربرد در پزشکی است که در طیف گستردهای از توابع دانش پزشکی و بهداشت کاربرد دارد. کاتترها وسیلهای در خدمت پزشکی هستند که میتوانند در بدن بیمار برای یک هدف معین استفاده شوند.
 1398/2/25 - 08:32
1398/2/25 - 08:32
ربات Cyberlegs: ربات توانبخشی هوشمند
ربات Cyberlegs یک ربات توانبخشی هوشمند بوده که اجازه میدهد از گشتاور مشترک و سینماتیک چرخه قدم زنی انسان با حفظ اتصالات سازگار و کاهش مصرف انرژی در طول راه رفتن باشد. این نمونه اولیه دارای یک زانو غیر فعال و یک مچ پا فعال است که برای کاهش مصرف انرژی به کار میروند. ربات Cyberlegs گشتاور لازم را در مچ پا و زانو برای یک فرد 80 کیلوگرمی در هنگام راه رفتن روی سطح زمین فراهم میکند و ...
 1398/2/24 - 08:22
1398/2/24 - 08:22
ربات LEeCH: زالو رباتیک هوشمند
ربات LEeCH یک زالوی رباتیک هوشمند بوده که با الهام از زالو میتواند از دیوار بالا برود و برای انجام حرکات مختلف بر روی یک سطح عمودی هیچ محدودیتی نداشته باشد. ربات LEeCH در هر جهتی از سطوح عمودی بالا میرود و حتی میتواند از یک سوی دیوار به سمت سطح دیگر آن بخزد. زالو به علت بهرهمندی از سطوح مکندهای در بخش تحتانی بدن خود میتوانند به سطوح مختلف بچسبند. در طراحی ربات LEeCH ...
 1398/2/23 - 08:31
1398/2/23 - 08:31
ربات Narwal: ربات جاروبرقی هوشمند
ربات Narwal یک ربات جاروبرقی هوشمند بوده که دارای قابلیت شستشوی خودکار و خلاء است و از LiDAR، SLAM و سنسورهای هوشمند استفاده میکند تا به راحتی مناطق زیرین خود را پاکسازی کنند. ربات Narwal دارای یک مخزن آب پنج لیتری میباشد و میتواند مساحت 2150 فوت مربع را پوشش دهد. ربات با تکنولوژی خودکار تمیزکاری میکند، بنابراین آن را به صورت خودکار شستشو و خشک میکند.
 1398/2/22 - 08:26
1398/2/22 - 08:26
ربات RVR: ربات حمل بار هوشمند
ربات RVR یک ربات حمل بار هوشمند بوده که به تریلر متصل میشود و میتواند با کمترین فضای پارک، آن را بدون اتصال به کامیون یا … حرکت دهد، بچرخاند و پارک کند. ربات RVR با استفاده از دو زنجیر به حرکت در میآید و قابلیت حرکت بر روی سنگ فرش، آسفالت، چمن و خاک را دارد. RVR به یک باتری لیتیوم یون قابل شارژ مجهز شده است و میتواند تا مدتی روشن باشد و خدمترسانی نماید.
 1398/2/21 - 07:41
1398/2/21 - 07:41
ربات Tesserae: ربات ماژولار هوشمند
ربات Tesserae یک ربات ماژولار هوشمند بوده که باید به عنوان ماژولهای قابل انعطاف و قابل تنظیم برای کمک به عملیات ماموریت چابک مورد توجه قرار گیرد. ربات Tesserae از مجموعهای از کاشیها ساخته شده است. این کاشیها با یک هندسه خاص تنظیم شده است. هر کاشی به حداقل شامل یک پوسته بیرونی سفت و سخت، حساسیت پاسخگو برای تشخیص پیوند، آهنرباهای الکتریکی دائمی برای کنترل پیوسته کنترل پویا و ...
 1398/2/18 - 08:02
1398/2/18 - 08:02
ربات Caudipteryx: ربات دایناسور هوشمند
ربات Caudipteryx یک ربات دایناسور هوشمند بوده که میتواند با سرعتهای مختلف روی تردمیل بدود. ربات Caudipteryx برگرفته از دایناسور " کهنبال"(Archaeopteryx) است. این دایناسور که در ۱۵۰ میلیون سال پیش میزیسته حدود یک متر طول داشته و ترکیب عجیبی از پرنده و خزنده بوده است. در ابتدا تصور میشد که این دایناسور پرواز نمیکند. نتیجه آزمایش ربات اینگونه شد که حرکت دو ربات باعث شد بالهای آن به پرواز درآید.
 1398/2/17 - 08:46
1398/2/17 - 08:46
ربات Simba: ربات ماژولار هوشمند
ربات Simba یک ربات ماژولار هوشمند بوده که بازوی ماژولار آن دارای یک واحد فعال برای هر ماژول است. برای افزایش قابلیت نگهداری، یک دست قابل تنظیم مجدد، برای سازگاری بهتر انگشتان با اشیاء در اشکال و اندازههای مختلف و پایه متحرک برای افزایش فضای کاری است. بازوها و گیرهها مکانیسمهای تاندون محور هستند که توسط موتورهای دنده DC بوجود میآیند و هر دو این اجزاء ربات دارای قابلیت تنظیم مجدد در طراحی آنها هستند.




