Romeo Robot: Smart Humanoid Robot





Romeo Robot, Romeo
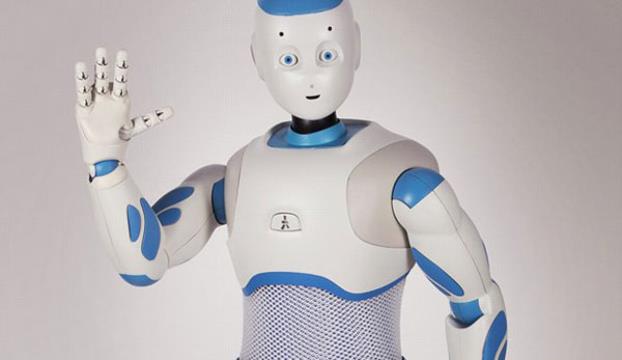
Romeo Robot has been conceived to one day work as an assistant to elderly persons, to lengthen the time that they can continue to live independently in their own homes. Romeo is be able to walk up stairs, support people that have difficulty walking, or fetch objects from another room by himself. Romeo can also remind his owners of appointments or tell them when to take their medicine. He does all of this with a certain human touch. Romeo robot has only been presented to the general public this year, in a revised version. There is a reason for the long development period. Although the developers already have extensive experience through their work on Romeo's smaller brother, Nao, of which 3000 models have already been sold, making a robot larger is not so easy.
Specifications (Romeo Robot):
| Weight | 36.6 kg |
| Height | 146.7 cm |
| CPU Processor | ATOM Z530 |
Articles (Romeo Robot):
"Romeo - Maxon Motor"

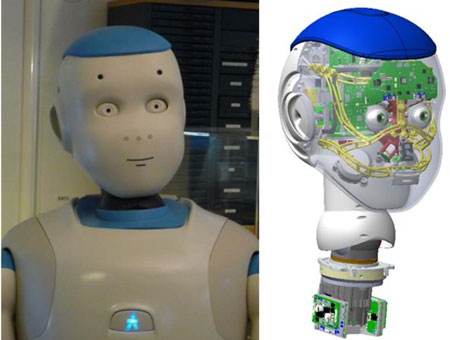
Head (Romeo Robot):
| From ... | To ... | X (mm) | Y (mm) | Z (mm) |
|---|---|---|---|---|
| Torso | NeckYaw | 0 | 0 | 93.5 |
| NeckYaw | NeckPitch | 0 | 0 | 0 |
| NeckPitch | HeadPitch | 0 | 0 | 95.11 |
| HeadPitch | HeadRoll | 0 | 0 | 0 |
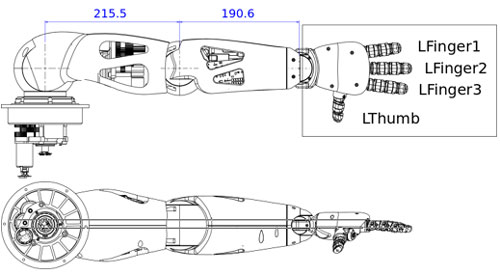
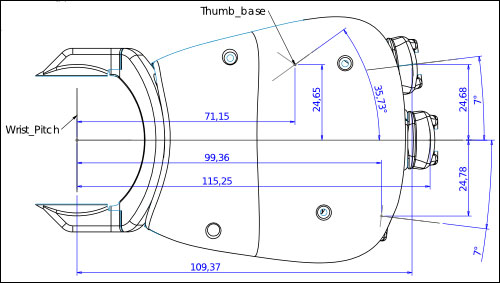
Hands (Romeo Robot):
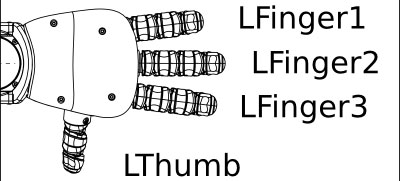
| From ... | To ... | X (mm) | Y (mm) | Z (mm) |
|---|---|---|---|---|
| LWristPitch | LFinger1 | 109.37 | 24.68 | 3.29 |
| LWristPitch | LFinger2 | 115.25 | 0.00 | 3.29 |
| LWristPitch | LFinger3 | 99.36 | -24.78 | 3.29 |
| LWristPitch | LThumb | 71.15 | 24.65 | -12.33 |
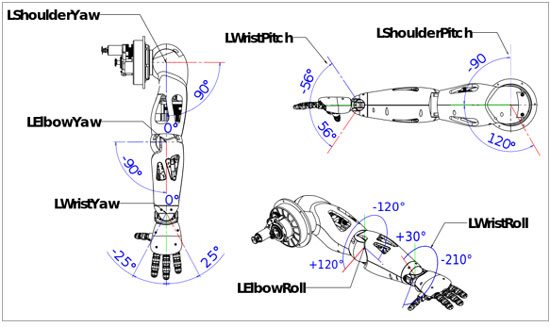
| Joint name | Motion | Range (degrees) | Range (radian) |
|---|---|---|---|
| LShoulderPitch | Left Shoulder joint (Y) | -82.7 to 127.2 | -1.44338729 to 2.22005880 |
| LShoulderYaw | Left Shoulder joint (Z) | -24.7 to 65.3 | -0.43109632 to 1.13970000 |
| LElbowRoll | Left Shoulder joint (X) | -120.0 to 120.0 | -2.09439510 to 2.09439510 |
| LElbowYaw | Left Elbow joint (Z) | -90.0 to 0.0 | -1.57079633 to 0.00000000 |
| LWristRoll | Left Elbow joint (X) | -210.0 to 30.0 | -3.66519143 to 0.52359878 |
| LWristYaw | Left Wrist joint (Z) | -25.0 to 25.0 | -0.43633231 to 0.43633231 |
| LWristPitch | Left Wrist joint (Y) | -56.0 to 56.0 | -0.97738438 to 0.97738438 |
Legs (Romeo Robot):
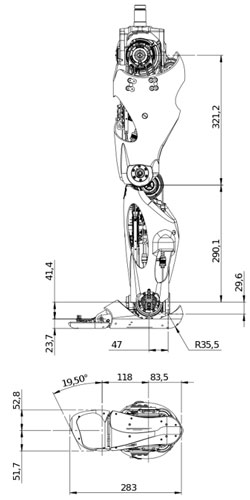
- Left
| From ... | To ... | X (mm) | Y (mm) | Z (mm) |
|---|---|---|---|---|
| TrunkYaw | LHipYaw | 0 | 96 | -344.3 |
| LHipYaw | LHipRoll | 0 | 0 | 0 |
| LHipRoll | LHipPitch | 0 | 0 | 0 |
| LHipPitch | LKneePitch | 0 | 0 | -321.1 |
| LKneePitch | LAnklePitch | 0 | 0 | -290.1 |
| LAnklePitch | LAnkleRoll | 0 | 0 | 0 |
| LAnkleRoll | LToePitch | 118.0 | 0 | -41.4 |
- Right
| From ... | To ... | X (mm) | Y (mm) | Z (mm) |
|---|---|---|---|---|
| TrunkYaw | RHipYaw | 0 | -96 | -344.3 |
| RHipYaw | RHipRoll | 0 | 0 | 0 |
| RHipRoll | RHipPitch | 0 | 0 | 0 |
| RHipPitch | RKneePitch | 0 | 0 | -321.1 |
| RKneePitch | RAnklePitch | 0 | 0 | -290.1 |
| RAnklePitch | RAnkleRoll | 0 | 0 | 0 |
| RAnkleRoll | RToePitch | 118.0 | 0 | -41.4 |
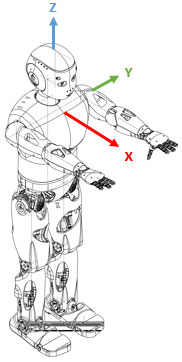
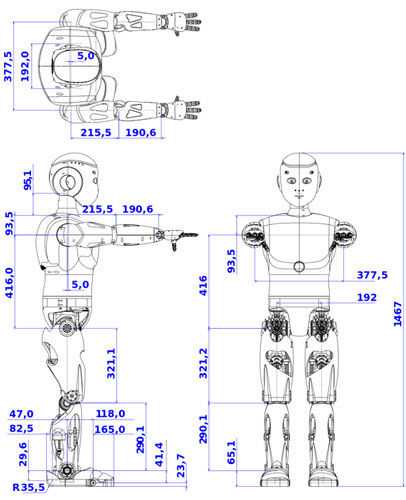
Anatomy (Romeo Robot):
Product:
- Country: Japan

- Company: SoftBank Robotics Corp
 Jenny Salmon
10:40 - 2020/08/08 Jenny Salmon
10:40 - 2020/08/08
|
|
Hi
I have a son with disabilities due to an accident and hospital mistakes a age 19, he is fully dependant on me his mother and I would love to have one of these to help with his disability. I was looking at nao for a companion but this is so much more is he available yet? please get back to me |
|
marius vulcanescu
04:39 - 2020/06/04
|
|
hi. this robot is awesome and could help me with my disability. I got injured doing home renovations and I suffer from a bad back and neck.
can I buy one of these robots, can we keep in touch I have a few questions. plus I went to school for robotics. im very familiar with different aspects of robotics. |
 Add Comment
Add Comment






